Baca Juga: Robot Ikan Siput Mampu Menjelajahi Palung Mariana, Laut Terdalam Bumi
Langkah pertama yang dilakukan tim peneliti adalah mengembangkan Jellyfish-Bot dengan satu elektroda, dengan enam jari atau lengan. Pada langkah kedua, tim membagi elektroda tunggal menjadi beberapa kelompok terpisah untuk menggerakkannya secara mandiri.
"Kami mencapai objek menggenggam dengan membuat empat lengan berfungsi sebagai baling-baling, dan dua lainnya sebagai gripper. Atau kami hanya menggerakkan sebagian lengan, untuk mengarahkan robot ke arah yang berbeda," kata Hyeong-Joon Joo.
"Kami juga melihat bagaimana kami dapat mengoperasikan secara kolektif beberapa robot. Misalnya, kami mengambil dua robot dan membiarkan mereka mengambil topeng, yang sangat sulit untuk satu robot saja."
"Dua robot juga dapat bekerja sama dalam membawa beban berat. Namun, pada saat ini, Jellyfish-Bot kami membutuhkan kabel. Ini adalah kelemahan jika kita benar-benar ingin menggunakannya suatu hari nanti di lautan."
Mungkin kabel yang menggerakkan robot itu akan segera menjadi masa lalu. Sebab, para peneliti sedang berupaya untuk menciptakan versi robot tanpa kabel.
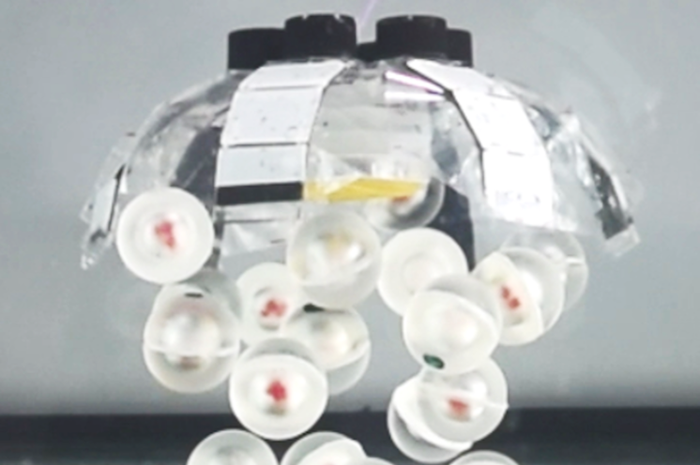
"Kami bertujuan untuk mengembangkan robot nirkabel. Untungnya, kami telah mencapai langkah pertama menuju tujuan ini. Kami telah memasukkan semua modul fungsional seperti baterai dan komponen komunikasi nirkabel untuk memungkinkan manipulasi nirkabel di masa depan," beber Tianlu Wang.
Tim peneliti telah memasang unit daya apung di bagian atas robot dan baterai serta mikrokontroler di bagian bawah. Mereka kemudian membawa penemuan mereka untuk berenang di kolam kampus Max Planck Stuttgart, dan berhasil mengarahkannya.
Namun sejauh ini, mereka belum dapat mengarahkan robot nirkabel itu untuk mengubah arah dan berenang ke arah lain. Tentu saja itu sangat mungkin bakal dicapai di masa depan dengan upaya pengembangan yang terus berlanjut.
| Source | : | Max Planck Institute for Intelligent Systems |
| Penulis | : | Utomo Priyambodo |
| Editor | : | Mahandis Yoanata Thamrin |










KOMENTAR