Nationalgeographic.co.id—Para peneliti di bidang robotika telah mengembangkan robot bawah air yang terinspirasi oleh ubur-ubur. Mereka berharap suatu hari nanti robot mirip ubur-ubur ini bisa mengumpulkan sampah dari dasar lautan.
Prototipe robot yang hampir bebas kebisingan ini dapat menjebak objek di bawah tubuhnya tanpa kontak fisik, sehingga memungkinkan interaksi yang aman di lingkungan yang sensitif seperti terumbu karang. Jellyfish-Bot ini digadang-gadang bisa menjadi alat penting untuk perbaikan lingkungan di bumi.
Saat ini sebagian besar permukaan bumi tertutup oleh lautan, yang sayangnya sangat tercemar. Salah satu strategi untuk mengatasi gundukan sampah yang ditemukan di ekosistem yang sangat sensitif ini—terutama di sekitar terumbu karang—adalah dengan menggunakan robot untuk pembersihan.
Namun, robot bawah air yang ada sebagian besar berukuran besar dengan badan kaku, tidak dapat menjelajahi dan mengambil sampel di lingkungan yang kompleks dan tidak terstruktur. Selain itu, robot bawah air yang ada juga berisik karena motor listrik atau pompa hidrolik.
Untuk menciptakan desain yang lebih cocok, para ilmuwan di Max Planck Institute for Intelligent Systems (MPI-IS) di Stuttgart mencari inspirasi dari alam. Mereka mengonfigurasi robot seukuran tangan yang terinspirasi ubur-ubur, serbaguna, hemat energi, dan hampir bebas kebisingan.
Jellyfish-Bot ini adalah hasil kolaborasi antara departemen Kecerdasan Fisik dan Material Robotik di MPI-IS. Laporan penelitian robot ini yang bertajuk "Platform Robotik Serba Guna Ubur-Ubur untuk Propulsi dan Manipulasi Bawah Air yang Efektif" telah terbit di jurnal Science Advances.
Untuk membuat robot ini, tim peneliti menggunakan aktuator elektrohidraulik yang mengalirkan listrik. Aktuator ini berfungsi sebagai otot buatan yang menggerakkan robot.
Di sekeliling otot-otot ini terdapat bantalan udara serta komponen lunak dan kaku yang menstabilkan robot dan membuatnya tahan air. Dengan cara ini, tegangan tinggi yang mengalir melalui aktuator tidak dapat menyentuh air di sekitarnya.
Catu daya secara berkala menyediakan listrik melalui kabel tipis, menyebabkan otot berkontraksi dan mengembang. Hal ini memungkinkan robot untuk berenang dengan anggun dan membuat pusaran di bawah tubuhnya.
"Ketika ubur-ubur berenang ke atas, ia dapat menjebak objek di sepanjang jalurnya karena menciptakan arus di sekitar tubuhnya. Dengan cara ini, ia juga dapat mengumpulkan nutrisi," jelas Tianlu Wang. Dia adalah pascadoktoral di Departemen Kecerdasan Fisik di MPI-IS dan penulis pertama makalah penelitian robot ini.
"Robot kami juga mengedarkan air di sekitarnya. Fungsi ini berguna untuk mengumpulkan objek seperti partikel limbah. Kemudian dapat mengangkut sampah ke permukaan, yang nantinya dapat didaur ulang. Ia juga mampu mengumpulkan sampel biologis yang rapuh seperti telur ikan."
"Sementara itu, tidak ada dampak negatif terhadap lingkungan sekitar. Interaksi dengan spesies air lembut dan hampir bebas kebisingan," papar Wang seperti dikutip dari keterengan Max Planck Institute for Intelligent Systems.
Rekan penulisnya, Hyeong-Joon Joo dari Departemen Material Robotik, menambahkan, "70% sampah laut diperkirakan tenggelam ke dasar laut. Lebih dari 60% sampah ini terdiri dari plastik, membutuhkan waktu ratusan tahun untuk terurai."
"Oleh karena itu, kami melihat kebutuhan mendesak untuk mengembangkan robot untuk memanipulasi objek seperti sampah dan mengangkutnya ke atas. Kami berharap suatu hari nanti robot bawah air dapat membantu membersihkan lautan kita," ujar Joo.
Jellyfish-Bots mampu bergerak dan menjebak objek tanpa kontak fisik, beroperasi sendiri atau dengan beberapa kombinasi. Setiap robot bekerja lebih cepat daripada penemuan serupa lainnya, mencapai kecepatan hingga 6,1 sentimeter per detik.
Apalagi Jellyfish-Bot hanya membutuhkan daya input yang rendah sekitar 100 mW. Dan aman bagi manusia dan ikan jika bahan polimer yang mengisolasi robot suatu hari nanti terkoyak.
Sejauh ini, kebisingan dari robot itu tidak dapat dibedakan dari tingkat latar belakang. Dengan cara ini Jellyfish-Bot berinteraksi secara lembut dengan lingkungannya tanpa mengganggunya --seperti rekan alaminya.
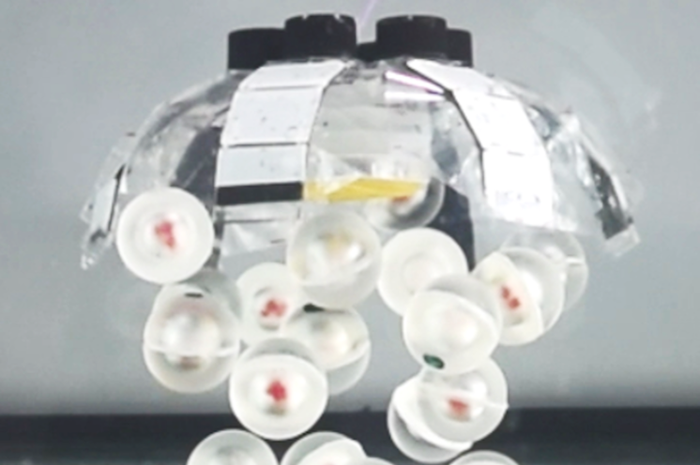
Robot ubur-ubur ini terdiri dari beberapa lapisan: beberapa membuat robot menjadi kaku, yang lain berfungsi untuk membuatnya tetap mengapung atau mengisolasinya. Lapisan polimer lebih lanjut berfungsi sebagai kulit mengambang.
Otot buatan bertenaga listrik yang dikenal sebagai HASEL tertanam di tengah lapisan yang berbeda. HASEL adalah kantong plastik berisi dielektrik cair yang sebagian ditutupi oleh elektroda.
Menerapkan tegangan tinggi melintasi elektroda mengisinya secara positif, sementara air di sekitarnya bermuatan negatif. Ini menghasilkan gaya antara elektroda bermuatan positif dan air bermuatan negatif yang mendorong minyak di dalam kantong bolak-balik, menyebabkan kantong berkontraksi dan rileks, menyerupai otot sungguhan.
HASEL dapat mempertahankan tekanan listrik tinggi yang dihasilkan oleh elektroda bermuatan dan terlindungi dari air oleh lapisan isolasi. Ini penting, karena otot HASEL belum pernah digunakan untuk membuat robot bawah air.
Baca Juga: Sains Terbaru, Robot Ini Bisa Berenang dengan Efisien Mirip Satwa Laut
Baca Juga: Robot Mikroskopis Ini Dirancang untuk Mengurai Mikroplastik di Lautan
Baca Juga: Robot Ikan Siput Mampu Menjelajahi Palung Mariana, Laut Terdalam Bumi
Langkah pertama yang dilakukan tim peneliti adalah mengembangkan Jellyfish-Bot dengan satu elektroda, dengan enam jari atau lengan. Pada langkah kedua, tim membagi elektroda tunggal menjadi beberapa kelompok terpisah untuk menggerakkannya secara mandiri.
"Kami mencapai objek menggenggam dengan membuat empat lengan berfungsi sebagai baling-baling, dan dua lainnya sebagai gripper. Atau kami hanya menggerakkan sebagian lengan, untuk mengarahkan robot ke arah yang berbeda," kata Hyeong-Joon Joo.
"Kami juga melihat bagaimana kami dapat mengoperasikan secara kolektif beberapa robot. Misalnya, kami mengambil dua robot dan membiarkan mereka mengambil topeng, yang sangat sulit untuk satu robot saja."
"Dua robot juga dapat bekerja sama dalam membawa beban berat. Namun, pada saat ini, Jellyfish-Bot kami membutuhkan kabel. Ini adalah kelemahan jika kita benar-benar ingin menggunakannya suatu hari nanti di lautan."
Mungkin kabel yang menggerakkan robot itu akan segera menjadi masa lalu. Sebab, para peneliti sedang berupaya untuk menciptakan versi robot tanpa kabel.
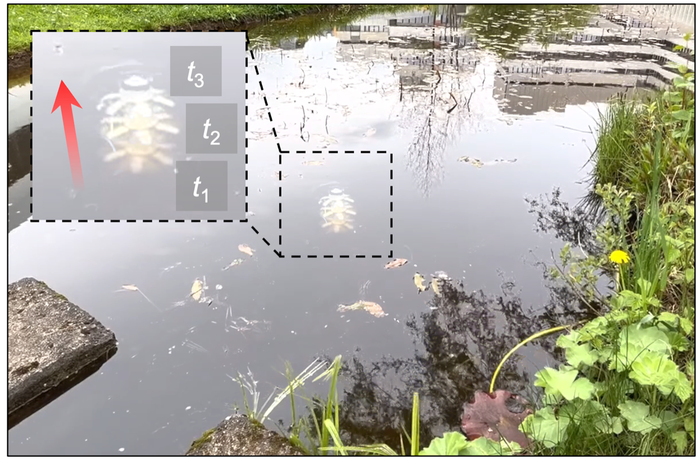
"Kami bertujuan untuk mengembangkan robot nirkabel. Untungnya, kami telah mencapai langkah pertama menuju tujuan ini. Kami telah memasukkan semua modul fungsional seperti baterai dan komponen komunikasi nirkabel untuk memungkinkan manipulasi nirkabel di masa depan," beber Tianlu Wang.
Tim peneliti telah memasang unit daya apung di bagian atas robot dan baterai serta mikrokontroler di bagian bawah. Mereka kemudian membawa penemuan mereka untuk berenang di kolam kampus Max Planck Stuttgart, dan berhasil mengarahkannya.
Namun sejauh ini, mereka belum dapat mengarahkan robot nirkabel itu untuk mengubah arah dan berenang ke arah lain. Tentu saja itu sangat mungkin bakal dicapai di masa depan dengan upaya pengembangan yang terus berlanjut.
| Source | : | Max Planck Institute for Intelligent Systems |
| Penulis | : | Utomo Priyambodo |
| Editor | : | Mahandis Yoanata Thamrin |










KOMENTAR