Nationalgeographic.co.id—Para ilmuwan teknologi dari University of Southampton dan University of Edinburgh di Inggris telah mengembangkan robot bawah air yang berbentuk fleksibel. Robot ini dapat mendorong dirinya sendiri mengarungi air dengan gaya yang sama seperti perenang alam yang paling efisien, yakni ubur-ubur Aurelia aurita.
Laporan sains terbaru atas pembuatan robot ini telah dipublikasikan di jurnal Science Robotics dengan judul makalah "A resonant squid-inspired robot unlocks biological propulsive efficiency". Laporan tersebut menunjukkan bahwa robot bawah air baru ini dapat berenang secepat dan seefisien cumi-cumi dan ubur-ubur yang menginspirasi pembuatan desainnya. Dengan desain yang ringan dan bagian eksterior yang lunak, robot ini juga berpotensi membuka kemungkinan cara baru untuk penjelajahan bawah air.
Dr Francesco Giorgio-Serchi, dosen dari School of Engineering di University of Edinburgh yang menjadi salah satu penulis dalam laporan studi ini, mengatakan, "Daya tarik terhadap organisme seperti cumi-cumi, ubur-ubur, dan gurita telah berkembang pesat karena mereka cukup unik dalam hal kurangnya struktur kerangka pendukung tidak menghalangi mereka dari prestasi renang yang luar biasa."
Berdasarkan perbandingan “biaya transportasi”, yakni rasio daya terhadap kecepatan dan berat, pada semua hewan di Bumi, ubur-ubur adalah hewan yang bergerak paling efisien. Efisiensi mereka mengalahkan hewan yang berlari dan yang terbang serta ikan-ikan bertulang.
Robot baru yang dikembangkan di University of Southampton ini merupakan kapal selam pertama yang mampu mendemonstrasikan manfaat penggunaan resonansi untuk penggerak bawah air. Resonansi mengacu pada getaran besar yang terjadi saat menerapkan gaya pada frekuensi yang ideal, seperti mendorong anak pada ayunan. Hal ini memungkinkan robot untuk menggunakan daya yang sangat kecil tetapi menghasilkan semburan air besar untuk mendorong dirinya sendiri ke depan.
Baca Juga: Robot Ikan Siput Mampu Menjelajahi Palung Mariana, Laut Terdalam Bumi
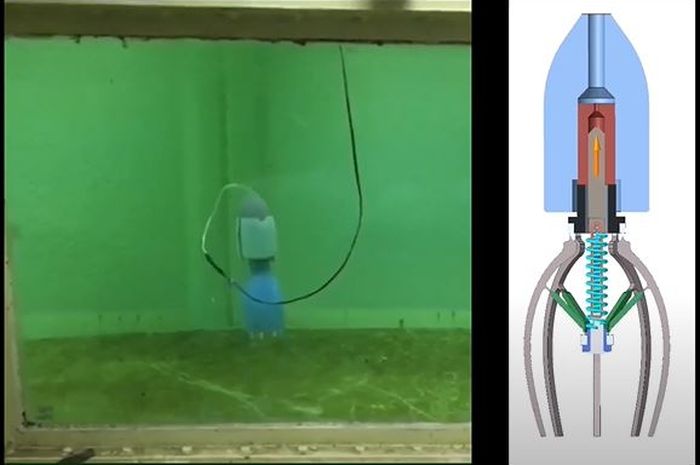
Mekanisme sederhana namun efektif yang digunakan ini terdiri atas membran karet yang menutupi delapan rusuk fleksibel cetak 3D, yang bersama-sama membentuk sebuah "bel pendorong". Piston kecil di setengah bagian atas robot mengetuk bel ini berulang kali sehingga mengembang dan kemudian berputar kembali.
Mekanisme gerakan ini meniru teknik berenang ubur-ubur dan menghasilkan semburan cairan untuk mendorong robot melewati air. Ketika piston beroperasi dengan frekuensi yang benar—resonansi alami untuk komponen-komponen tersebut—maka robot dapat bergerak dengan satu panjang tubuh per detik dan sesuai dengan efisiensi ubur-ubur Aurella aurita.
Tes terbaru menunjukkan robot baru ini sepuluh hingga lima puluh kali lebih efisien daripada kendaraan bawah air kecil biasa yang gerakannya didukung oleh baling-baling. Peningkatan efisiensi ini, dikombinasikan dengan manfaat tambahan dari bagian luar robot yang lunak dan fleksibel akan membuatnya ideal untuk pengoperasian di dekat lingkungan sensitif seperti terumbu karang, situs arkeologi, atau bahkan di perairan yang penuh dengan para perenang.
Thierry Bujard, seorang mahasiswa magister di Naval Architecture di University of Southampton yang terlibat dalam laporan studi ini, mengaku merancang dan membangun robot tersebut dalam hitungan bulan. Thierry berkata, “Percobaan-percobaan sebelumnya untuk mendorong robot bawah air dengan sistem pengaliran melibatkan mendorong air melalui tabung yang kaku, tetapi kami ingin melangkah lebih jauh sehingga kami memakai sifat elastisitas dan resonansi untuk meniru biologi (ubur-ubur). Saya sangat terkejut dengan hasilnya. Saya yakin desainnya akan berhasil, tetapi hasil efisiensi robot ini jauh lebih besar dari yang saya kira."
Baca Juga: Kejutan Laut Dalam, Peneliti Menemukan Jalur Tak Terduga di Dasar Laut
Dr Gabriel Weymouth, Associate Professor dari School of Engineering di University of Southampton, yang mengawasi proyek sains terbaru tersebut menambahkan, “Hal terbaik tentang penggunaan resonansi adalah kita dapat mencapai getaran besar dari bel penggerak dengan daya yang sangat kecil. Kita hanya perlu menyodoknya keluar dari bentuknya dan membiarkan elastisitas dan kelembaman mengerjakan sisanya. Hal ini memungkinkan kami untuk meniru efisiensi tenaga penggerak yang digunakan oleh makhluk-makhluk laut yang menggunakan jet untuk berenang."
Selama dekade terakhir, telah muncul lonjakan penelitian tentang robot-robot yang fleksibel dan terinspirasi oleh makhluk-makhluk hidup di alam, seperti robot anjing besar buatan Boston Dynamic, karena mereka bisa jauh lebih serbaguna daripada robot industri standar yang kaki. Penelitian sains terbaru robot ubur-ubur ini menunjukkan bahwa konsep-konsep ini juga dapat diterapkan pada robotika bawah air.
“Masih banyak tantangan dan kemungkinan menarik untuk dijelajahi dengan teknologi robot lunak bawah air. Kami sekarang ingin memperluas konsep di balik robot ini menjadi kendaraan bawah air yang sepenuhnya dapat bermanuver dan otonom yang mampu merasakan dan menavigasi lingkungannya sendiri.”
| Source | : | University of Southampton |
| Penulis | : | Utomo Priyambodo |
| Editor | : | Mahandis Yoanata Thamrin |















KOMENTAR